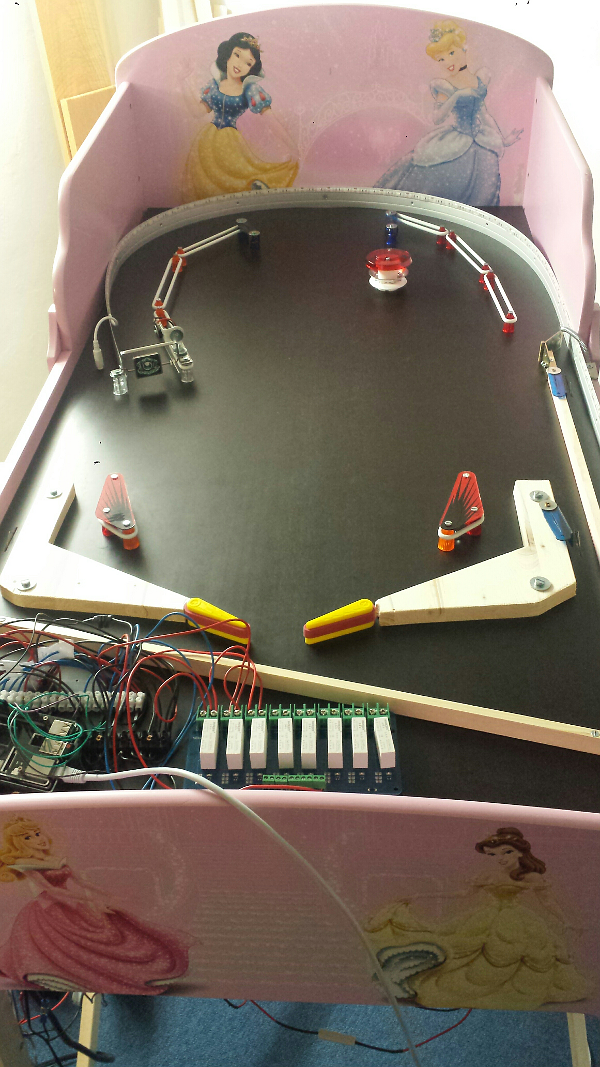
Today I spend some time investigating the issue with the weak flipper finger. First I debugged the software. Each 1000 loops the average time that the software needs in the loop was calculated. As the numbers are pretty stable around 0.005, which is the defined sleep timeout, we can say that the software runs inside our defined parameters and is quite reliably. Next the value of the HIGH flipper finger timeouts were increased by 0.01 to make sure that the magnetic field does not collapse to early. Without any effect. Last I inspected the flipper finger mechanics carefully and I notices that the right flipper finger requires a grain more power when the EOS switch was reached in comparison to the left flipper finger. In addition the EOS switch was triggered in the middle of the movement and not in the end phase. Long story short: The solution was to bend the EOS switch manually a bit to make sure that the switch is triggered at the end of the movement and the ball now gets kicked hard. Small details can have great impacts when building a DIY pinball machine 🙂
A short video that shows the current state: