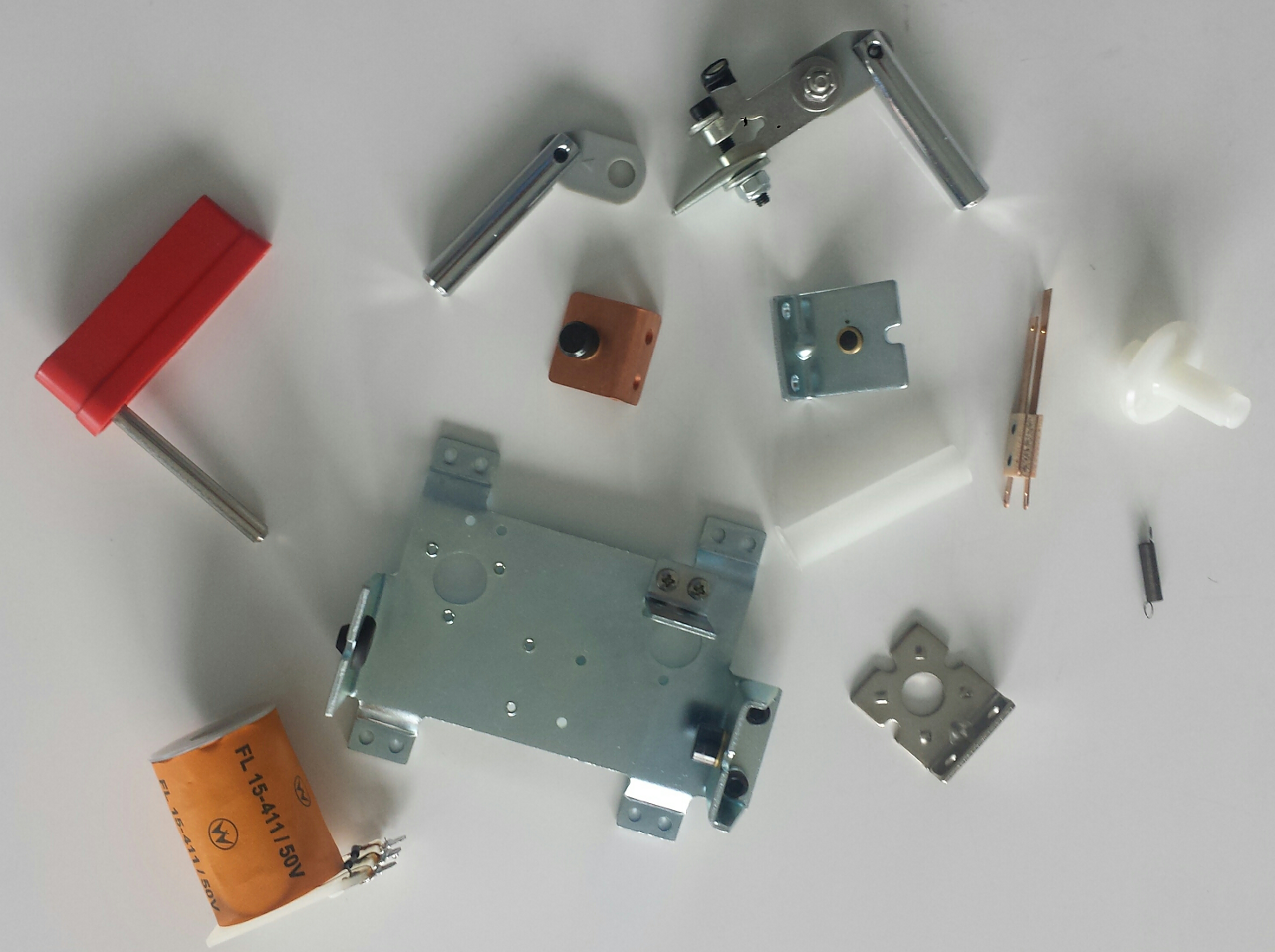
Yeah, bumper time. To be precise: pop bumper time. Here are the parts we have to assemble.
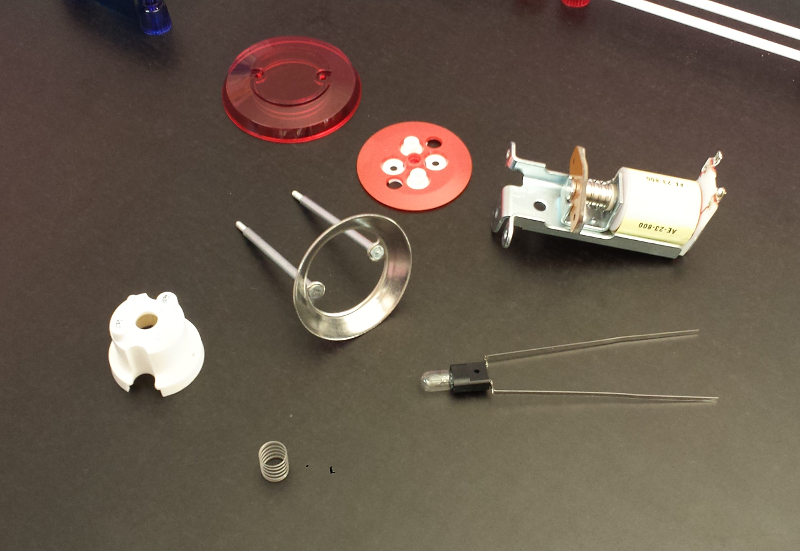
Worth to mention that the coil in the picture is an AC coil without diode and I soldered the diode myself to make it work in my DC voltage environment. And this is how it should work: a pop bumper kicks the ball when a ball hits the bumper plastic skirt. The plastic skirt triggers the switch which gives the impulse to fire up the coil. The coil pulls down the rod and ring assembly to accelerate the ball. Easy as eating cake. I started with mounting the coil:

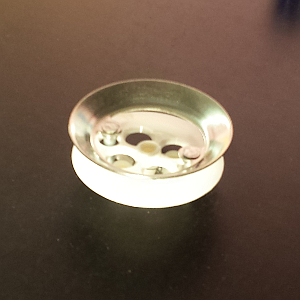
I used the bumper base for marking all holes and mounted the coil first with only one screw to make sure that all movable parts have enough space. Mounting pop bumper requires lots of drilling BTW. In the next step we place the skirt and fix the rod and ring assembly.
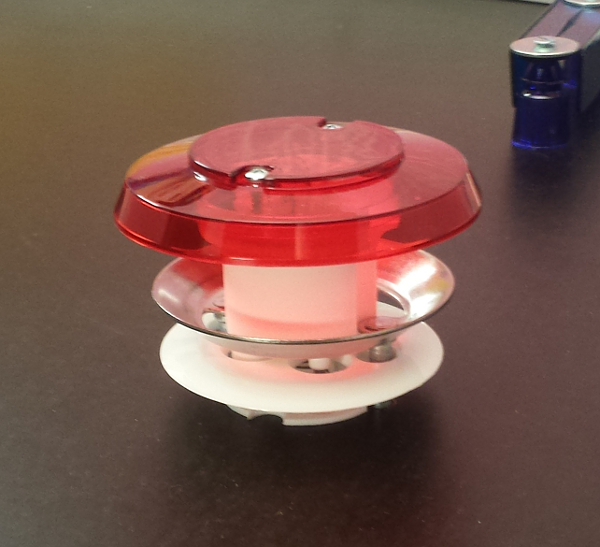
Screwing the bumper body and fixing all parts comes next. It is a bit tricky to stick the lamp pins through the tiny holes but who cares.

To make it look like a real bumper the last visible step is to add the cap.
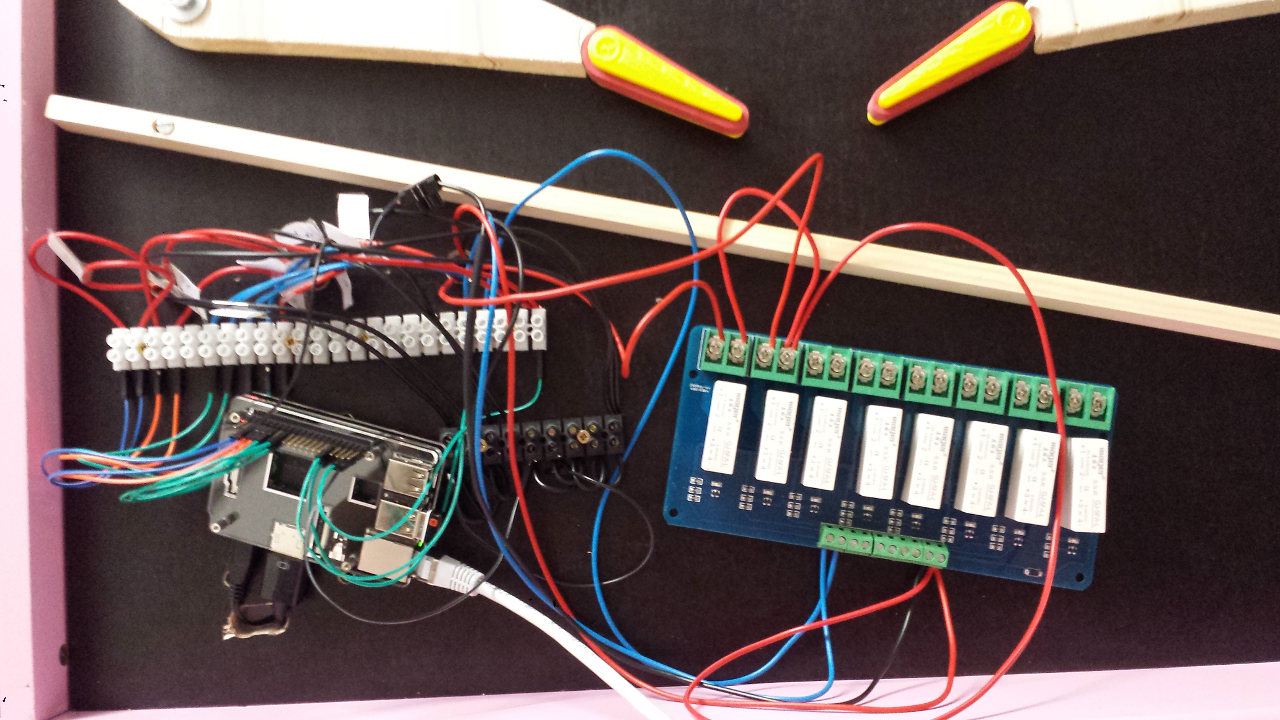
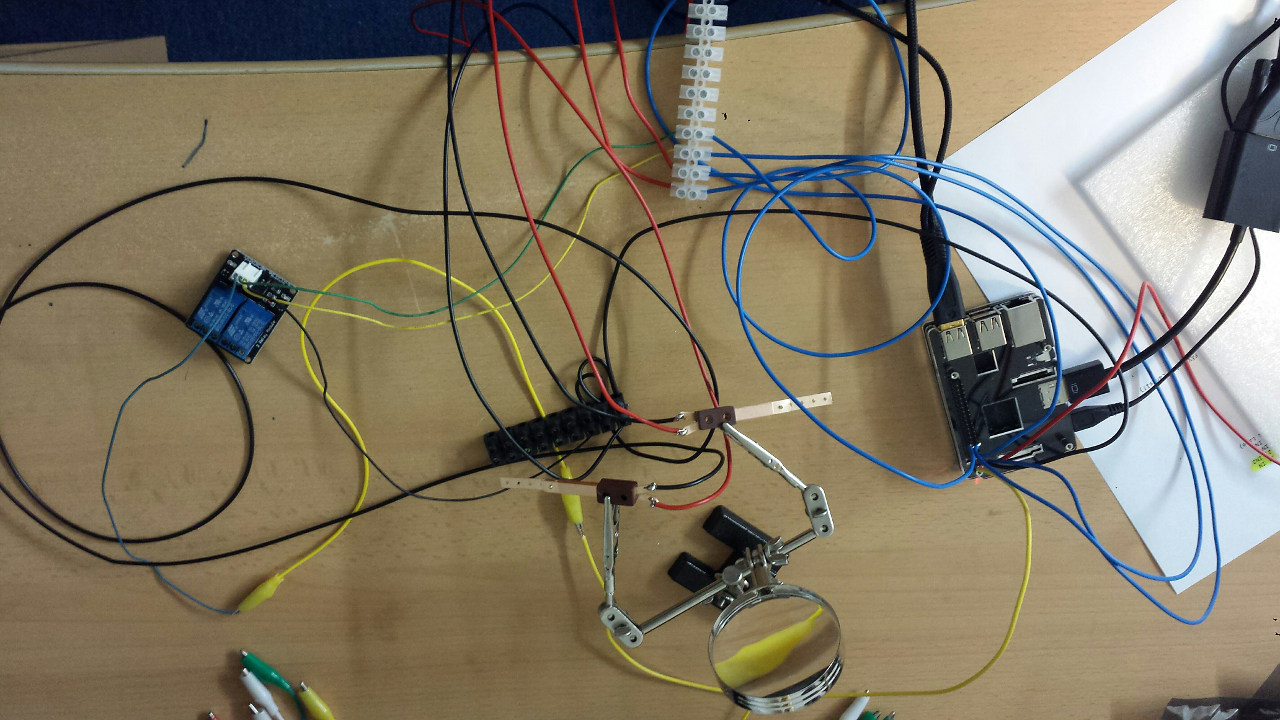
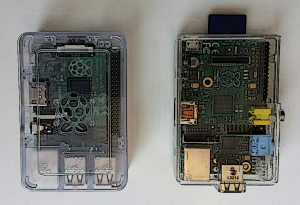
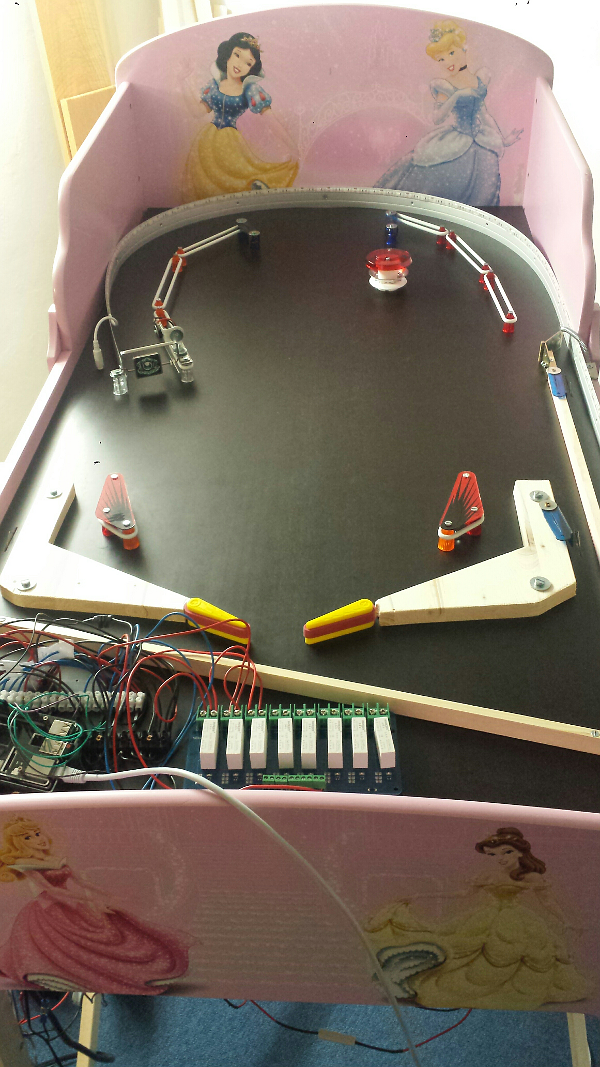
The real tricky part is to make the bumper work in the way that the skirt does not get caught but activates the switch. In my case I replaced the original switch bracket with a piece of wood strip. I had to try several wood strips in different thickness to make it work. Try and error is the motto. Because I’m using a Raspberry Pi for the switch input testing was easy. I made sure that the bumper switch worked correctly before I wired the coils and relays. I also developed the logic and dry tested some „hiccups“ to avoid burning the coil in advance by adding some special cool downs. Will play around and maybe adjust some timers though. And finally here is a current picture of the play field:
My pinball source code incl. all bumper specifics is available on Github as always, if you are interested. What I recognized while playing the current state is that I get sometimes a short but noticeable delay which results in weak flipper finger strength. As I’m using a Raspberry Pi 2 with multiple cores I introduces multiprocessor support for the sound module. Did not help as much as I thought so this issue is definitively something I need to address as the fun part depends a lot on precision. One solution to address this delays could be to introduce tmpfs and put all sounds into memory to avoid I/O wait conditions. So there is enough stuff on my to-do list. Get excited and have fun.